雷达杂波处理(Clutter Process)
固定杂波阈值分割
优点:原理简单实现难度低
缺点:阈值门限难以确定,阈值设置的过高,虚警(false alarms)会降低,但同时也会掩盖有效的目标,阈值门限设置的过低,则会导致过多的错误警报。
去除0多普勒速度信号(将回波信号中具有0多普勒速度的信号去除)
优点:原理简单,实现难度低,由于场景中的杂波往往是由静止目标产生,0多普勒滤波能有效地去除这些杂波。
缺点:此方法会导致雷达不能检测场景中的静态目标,这将导致检测失败。
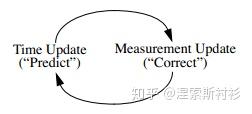
系统状态矩阵
观测矩阵
其中$X{k}$表示系统状态矩阵,$Z{k}$表示系统观测矩阵
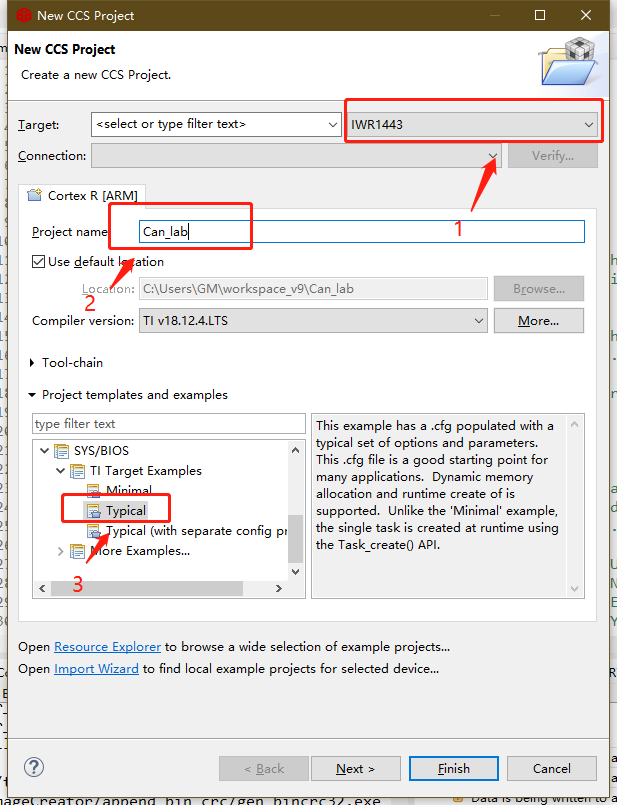
TI为推出的IWR1443毫米波雷达评估板提供了丰富可用的演示demo,这些都需要上电之后下载配置文件,这里经过修改可以将配置文件固化在固件中,使得评估板上电即开始工作。
不过需要注意的是评估板的芯片版本必须与SDK的版本一致,否则会出现无法下载固件,CCS编译错误等问题。
我目前手头的IWR1443对应的SDK版本为mmwave_sdk_02_01_00_04
对应的demo工具箱版本号为mmwave_industrial_toolbox_3_6_1